
ROS실습7
windows에서 raspberrypi 접속: ssh pi@xxx.xxx.xxx.xxx 터미널창에 복붙 -> 검은 배경에 우클릭
터틀봇 조립 확인

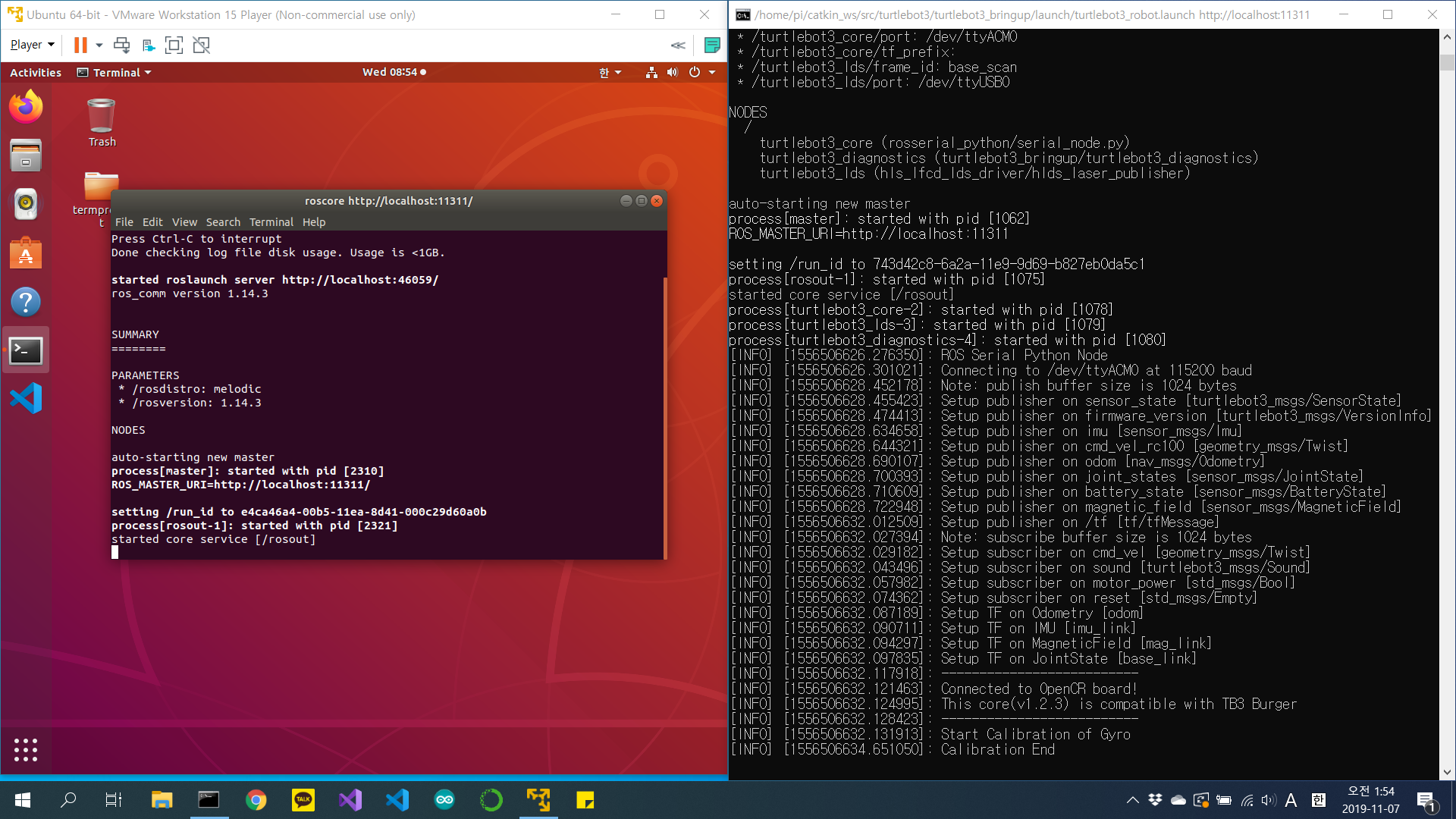
7.2. Bringup a TurtleBot3
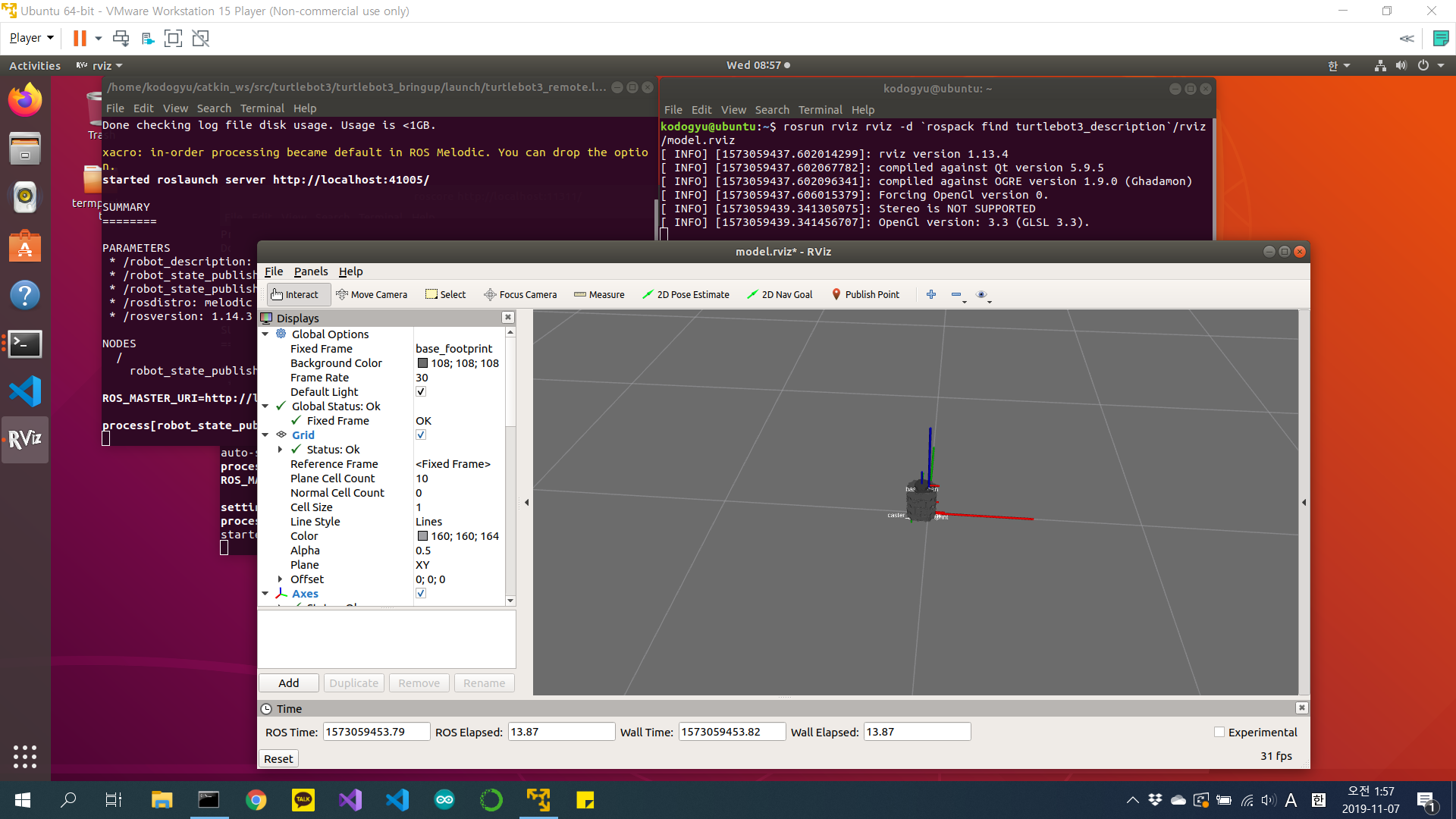
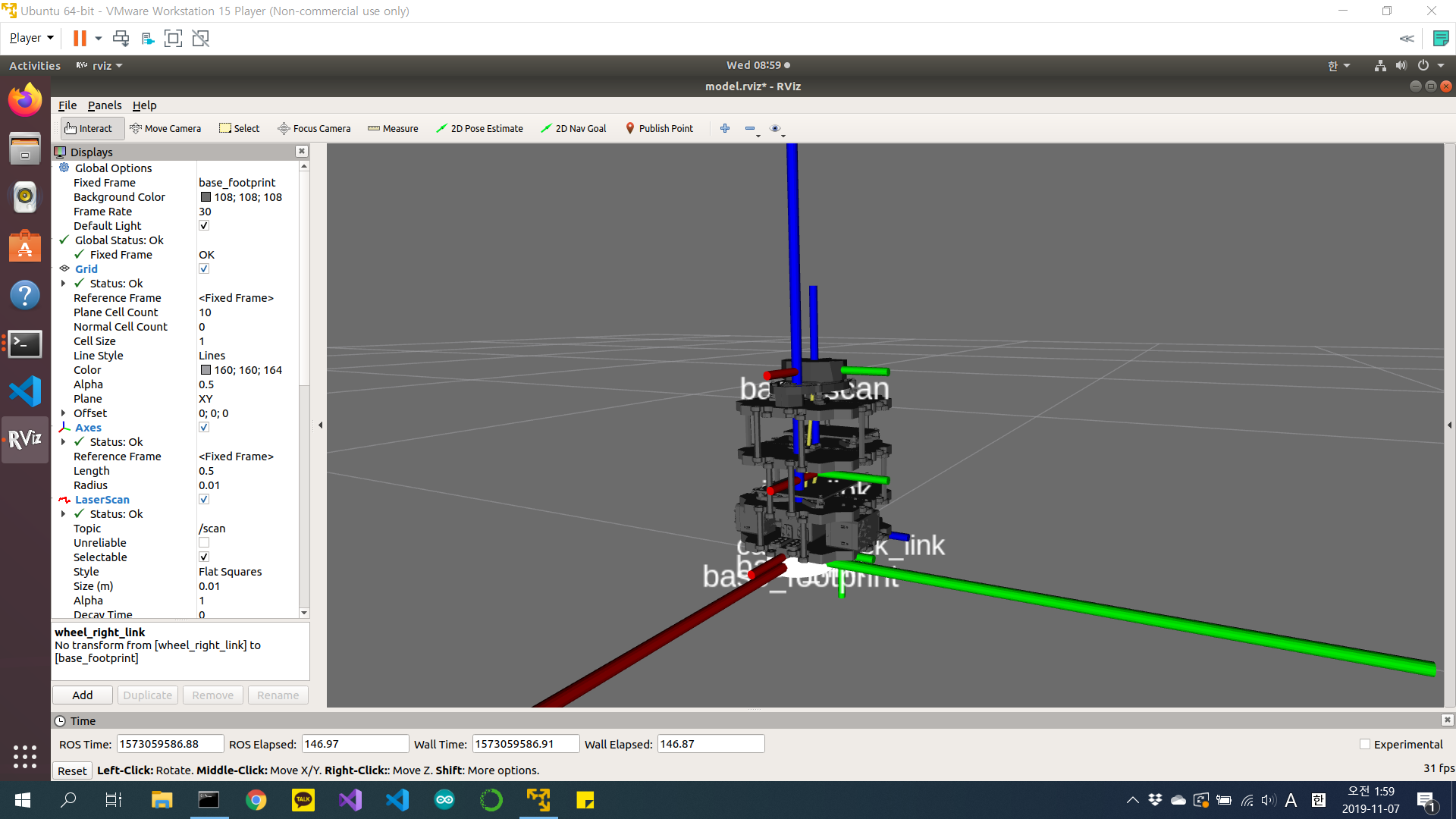
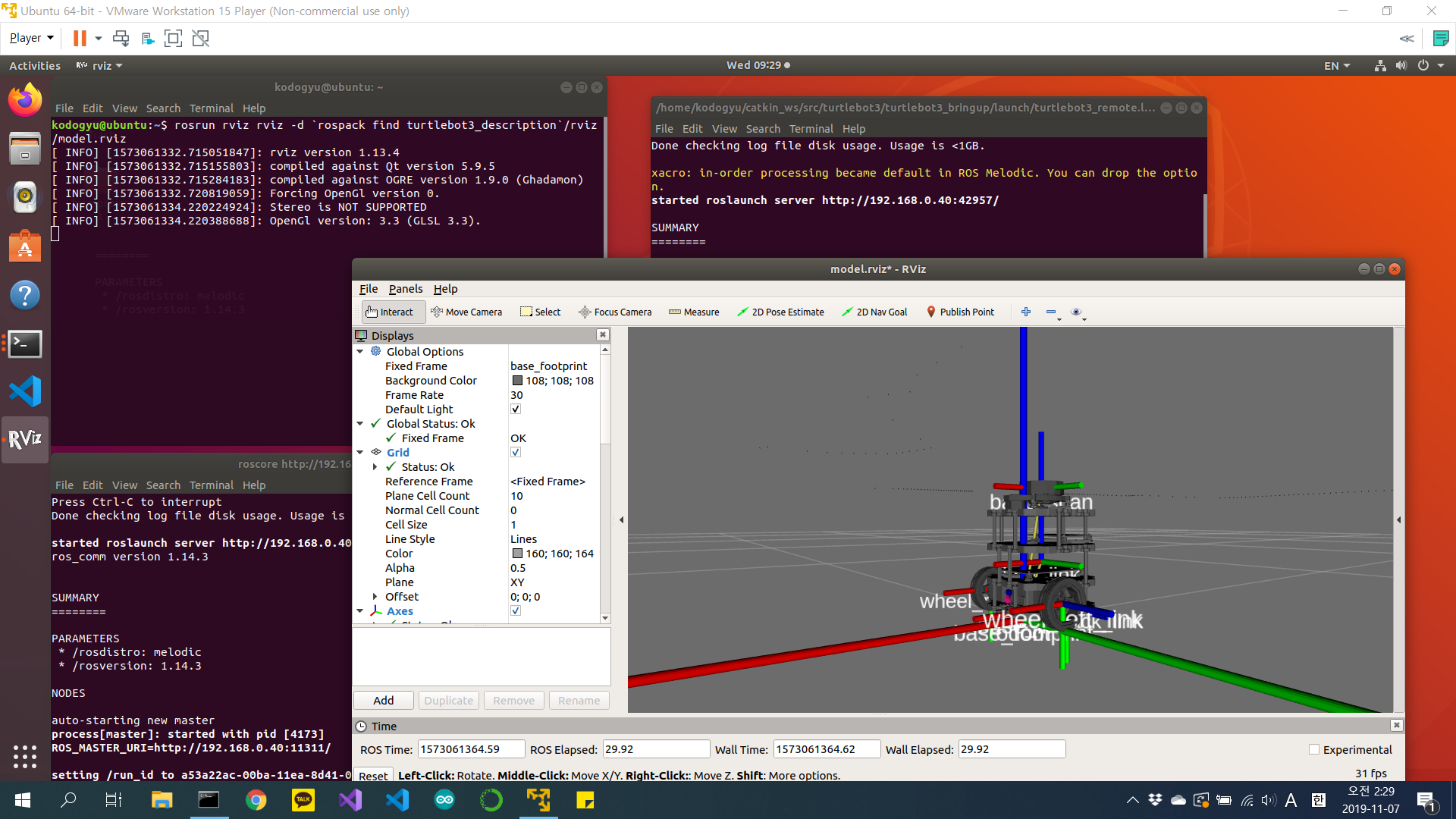
7.3. Load a TurtleBot3 on Rviz
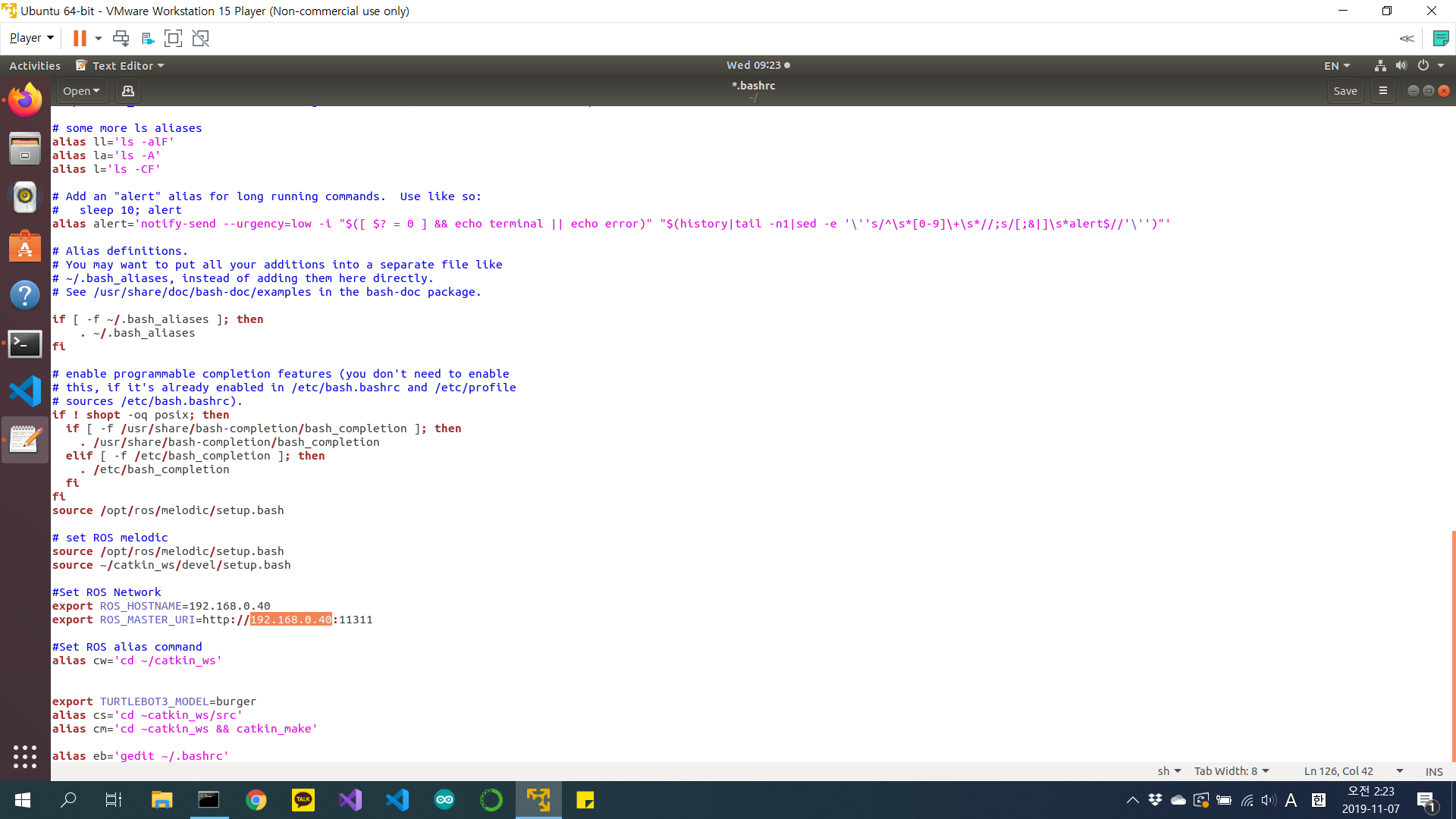
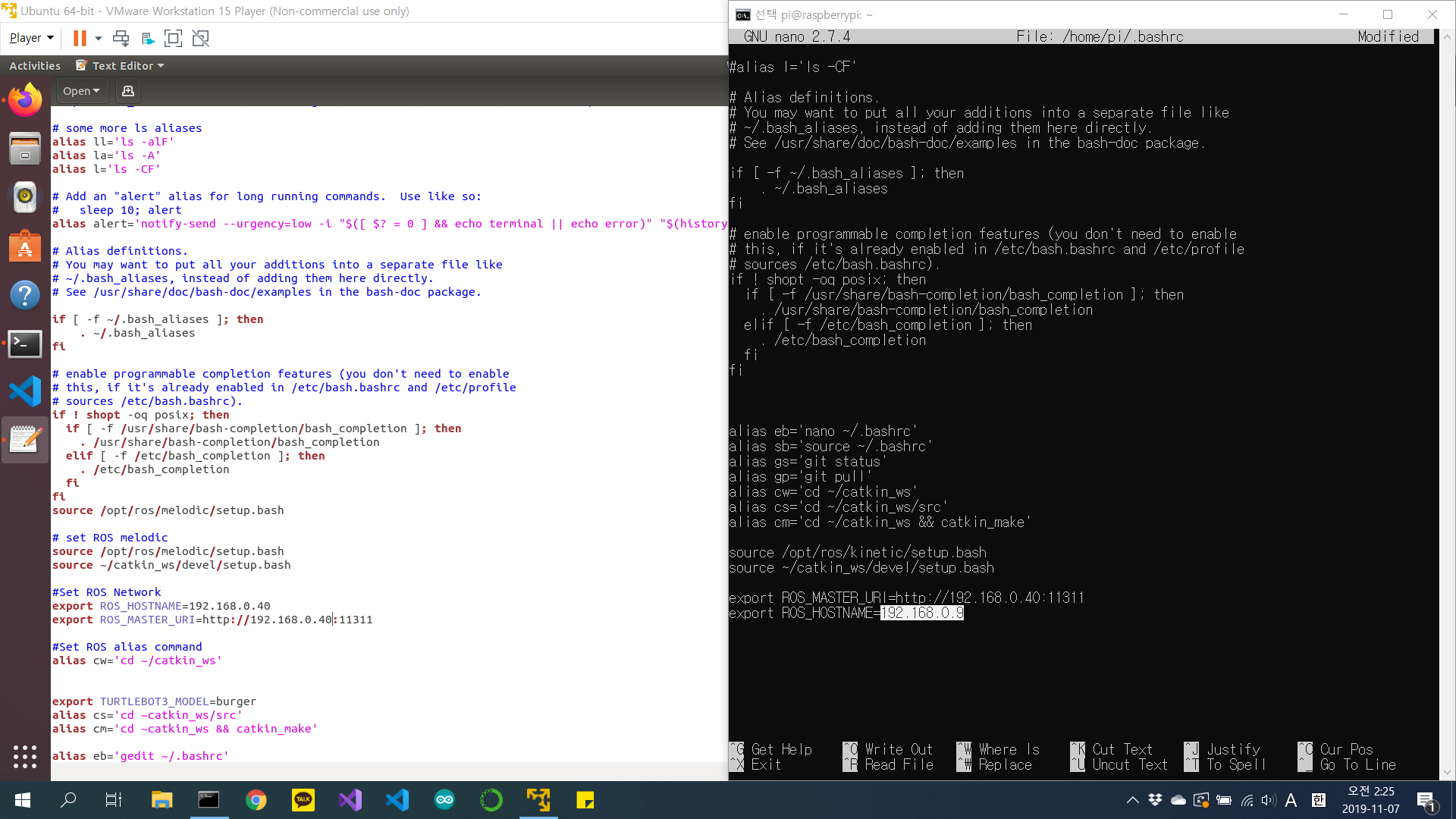
bashrc파일 수정(ubuntu, raspbian 모두) ->gedit ~/.bashrc
7.3. Load a TurtleBot3 on Rviz
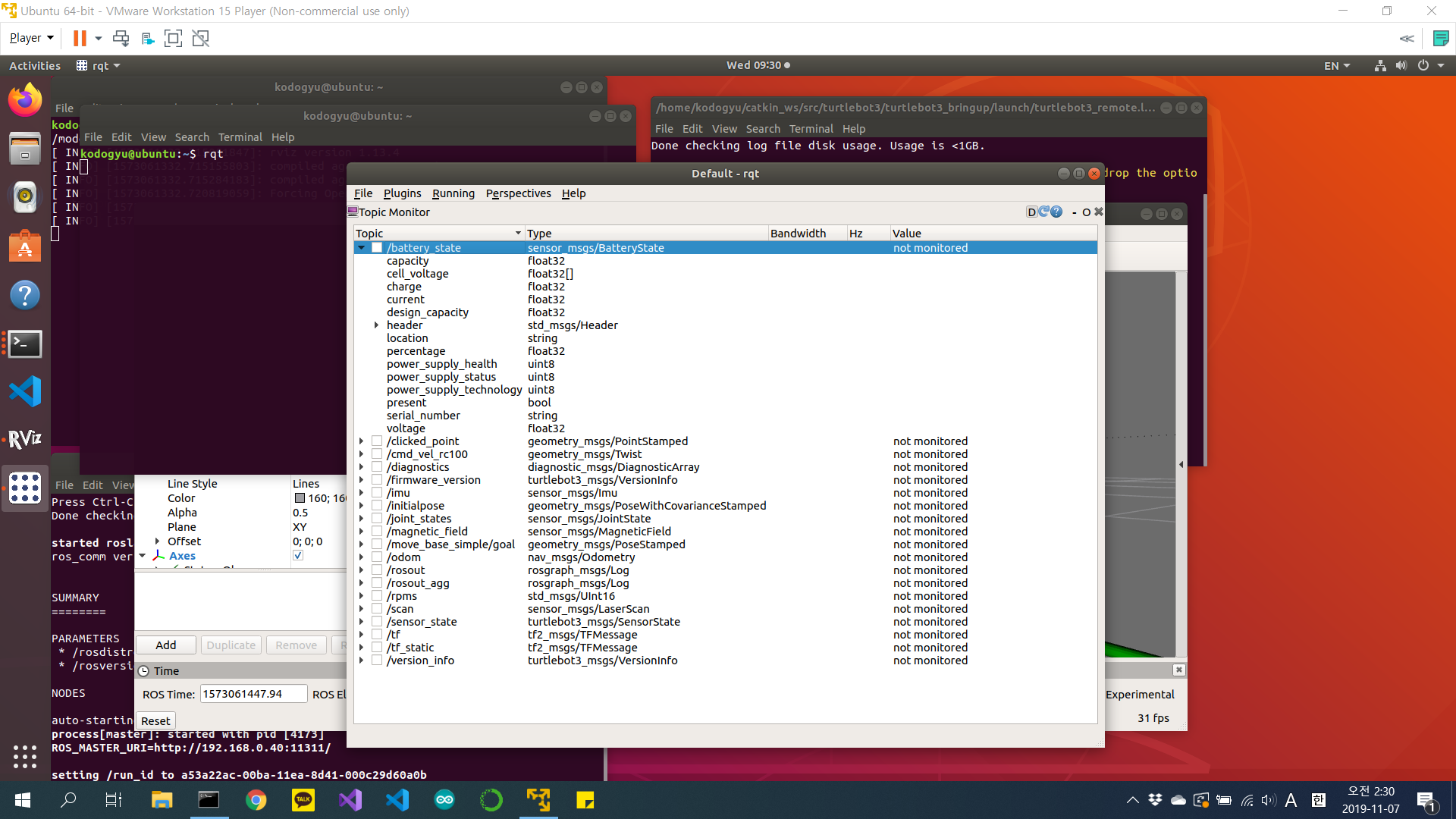
topic monitor

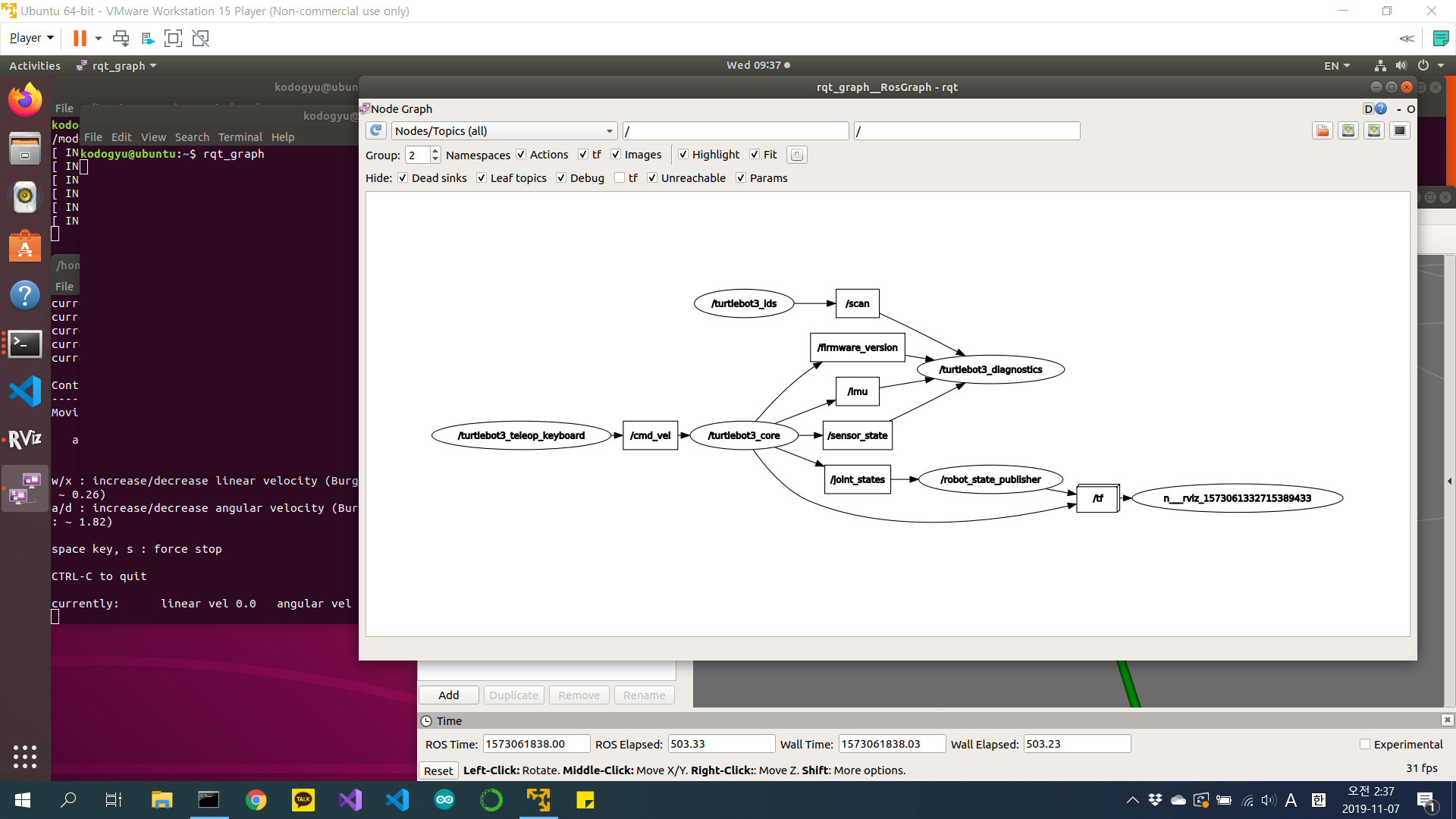 rqt_graph
rqt_graph